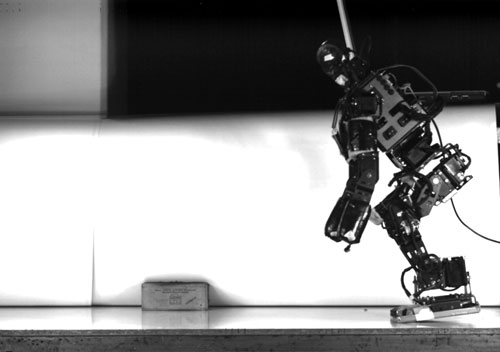
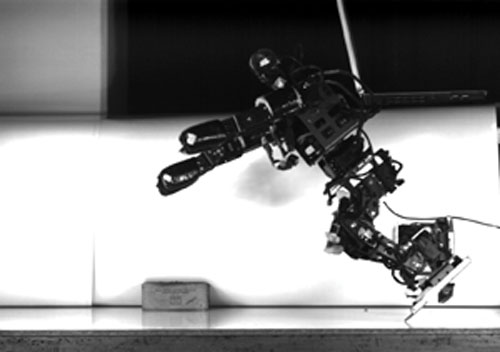
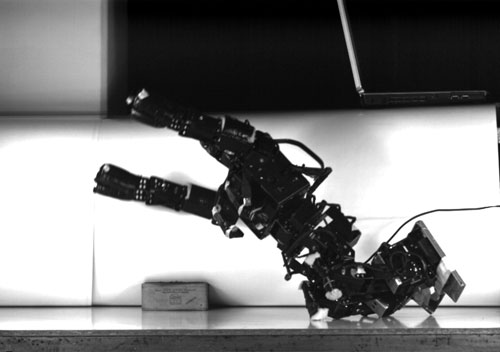
Современного футболиста тренеры в обязательном порядке учат падать таким образом, чтобы свести к минимуму получение серьезных травм. И надо сказать, это умение весьма важно, ведь футбол является контактной игрой. Причем иметь определенные навыки должен не только человек-спортсмен, но и робот-футболист, для которого неудачное падение может повлечь за собой различного рода неприятности, в том числе и серьезные повреждения конструкции. Решением задачи обучения роботов контролируемому падению занялась команда робототехников Чилийского Университета Сантьяго (University of Chile in Santiago), руководство которой осуществляет Хавьер Руиз-дель-Солар (Javier Ruiz-del-Solar). Надо отметить, что группа ученых уже имеет огромный опыт в роботостроении, ведь она «тренирует» две команды роботов, участвующих в ежегодном соревновании RoboCup. Считается, что одной из целей проекта RoboCup является создание столь умелой и совершенной футбольной команды роботов, что она сможет дать бой футболистам из плоти и крови. Сами разработчики поставили перед собой план достижения заветной цели к 2050 году. Основным направлением развития роботов до этого момента оставалось именно предотвращения их падения – повышались умения балансировать, развивался «вестибулярный» аппарат. Но во многих случаях все же не удается сохранить равновесие, и тут роботы действовали далеко не с лучшей стороны, а именно, полностью отключались до того момента, как датчики не давали информацию о достижении горизонтального положения. То есть, действовать робот только после того, как уже упал, и попытки сгладить падение не предпринимались. Но, как и в случае с человеком, неудачное падение может приводить к целому ряду повреждений, и чтобы предотвратить их команда исследователей решила обучить роботов правильно приземляться. Для поиска оптимального варианта падения исследователи использовали компьютерное моделирование на основе, основанное на одном из роботов-гуманоидов Нао. Именно этот аппарат используется всеми командами на соревновании RoboCup. Исследователи обнаружили, что оптимальным способом предотвращения травм является применения конечностей, на которые робот и приземляется, спасая тем самым голову со множеством размещенных на ней датчиков и камер. Еще одним вариантом является приземление последовательно на ряд точек, при этом каждое касание с полом снижает энергию падения, распределяя ее на всю конструкцию. Обучив определенной технике падения робота-гуманоида UCH H1 ученые показали, что значительно снижается вероятность повреждения конструкции. Даже простое сгибание ног в коленях, что снижает центр тяжести, способствует более мягкому и безопасному падению. Проделанная работа даст знать о себе на очередном соревновании RoboCup, где впервые выступят аппараты, научившиеся безопасно приземляться, после чего продолжать игру без серьезных последствий. |